Вам понадобится
- - двигатель привода головки от флоппи-дисковода;
- - микросхема ULN2003A;
- - процессор PIC16F84;
- - соединительные провода.
Инструкция
1
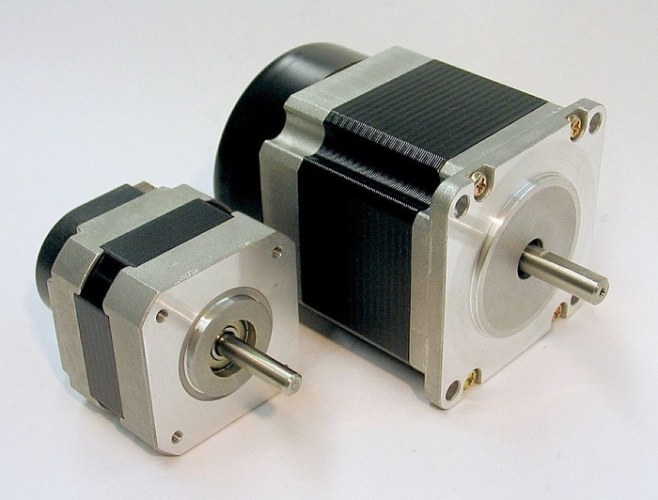
Используйте для изготовления шагового двигателя устройство привода головки записи-чтения от флоппи-дисковода 5,25 дюйма, например, марки TEAC. Оно представляет собой униполярный двигатель с пятью выводами. Четыре вывода подсоединены к обмоткам, а пятый является общим и служит для подачи питания 12В. Указанный двигатель обеспечит шаг в 1,8 градуса, поэтому для полного оборота вала понадобится подать 200 импульсов.
2
При отсутствии указанного устройства возьмите двигатель от более современного дисковода, рассчитанного на 3,5 дюйма. Учитывайте при этом, что такой двигатель является биполярным, поэтому потребует установки специального драйвера для управления системой.
3
Приготовьте микросхему ULN2003A, представляющую собой набор транзисторов с открытым коллектором и защитным диодом в цепи нагрузки. Подключите первые четыре вывода двигателя соответственно к выводам микросхемы, имеющим маркировку 14, 13, 12, 11. Для подсоединения используйте специальный клеммный зажимной блок либо произведите соединение посредством пайки.
4
Выводы микросхемы с третьего по шестой подсоедините соответственно к выводам процессора PIC16F84, имеющим нумерацию с шестого по девятый. Включение и выключение шагового двигателя будет осуществляться посредством кнопки, подключенной к выводам MCLR и VSS, имеющимся на процессоре.
5
По окончании монтажа схемы подайте питание 12В, используя соответствующий общий провод, идущий от двигателя. Программа подаст на обмотки 200 импульсов, что обеспечит половинный или полный оборот вала в импульсном режиме. После этого следует пауза, по окончании которой вал в том же шаговом режиме проворачивается на 180 градусов в обратном направлении либо делает полный оборот (это определяется заданным режимом).
Видео по теме
Источники:
- Журнал «Современная электроника», «Первый шаг «шагового» двигателя», Олег Пушкарев, октябрь 2004.